摘要:在众多的交通事故中,与自行车有关的事故,其比例有逐年上升的趋势.除了自行车数量增加、人车混合交通,全民交通安全意识不足等原因外,我认为自行车安全防护的相关设计明显不足,一直没有很好改进。经调查发现,我认为还有两个很重要的原因:
1)骑行的人发现不了后面行驶车辆的情况,没有引起安全警觉;
2)开汽车的司机没有准确判断前方自行车的即将转向动作;发现时已来不及做出反应;
关键词:AI摄像头、物体识别、语音合成、掌控板、转向传感
1、项目作品概述
1.1作品背景


骑自行车上学一直是我国中学生交通的主要交通工具;据官方数据近几年,我国自行车产量大幅增长,2019年达到7553.81万辆, 2020年达到8162.26万辆。
在众多的交通事故中,与自行车有关的事故,其比例有逐年上升的趋势.除了自行车数量增加、人车混合交通,全民交通安全意识不足等原因外,我认为自行车安全防护的相关设计明显不足,一直没有很好改进。
近日,据松果出行旗下松果智库发布《中国电动自行车防预性驾驶报告》,该报告首次将汽车的“防御性驾驶”理念引入两轮车领域;报告总结了自行车“防预性驾驶十原则”安全指南,从佩戴头盔、骑行玩手机、识别盲区、规避“鬼探头”等事故原因。
经调查发现,我认为还有两个很重要的原因:
1)骑行的人发现不了后面行驶车辆的情况,没有引起安全警觉;
2)开汽车的司机没有准确判断前方自行车的即将转向动作;发现时已来不及做出反应;
基于以上的观察与分析,我设计了这款《基于人工智能的中学生安全骑行酷装 》。
1.2作品设计意向效果图
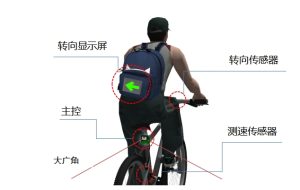
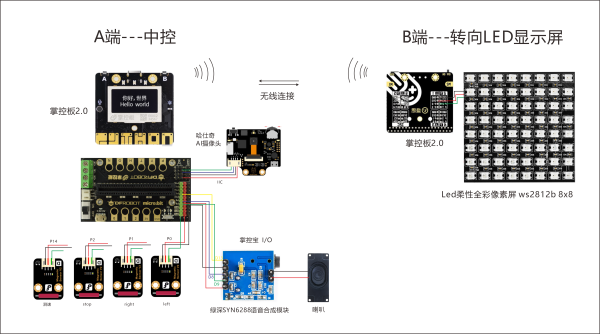
作品由四个部分构成:
主控—安装在车座支撑杆上,负责数据采集、判断、发出指令等;
转向传感器—安装在车把转动轴上,负责自动感应骑车者的转向、刹车动作;
转向显示屏—安装在上学生的背包上,自动对码、无线接收中控的指令,并作出转向的显示;
测速传感器—安装在后轮三角支架处,自动检测车速;
1.3实现功能与工程结构设计要求
1.3.1实现功能要求:
1)可以自动判断自行车后面的车辆类别,并及时语音提示骑车者;
2)对骑车者的车速发出声音报警,提醒骑车学生安全行驶;
3)适时显示骑行学生的行驶方向,即时友好的提示后面行驶的车辆;
1.3.2工程结构要求:
1)安装灵活:AI摄像头与主控板结合安装在车座下,可调整上下角度,可拆卸。
2)无线连接:主控与转向显示屏连接,自动对码;
3)无线语音传输:警示语音无线传输,避免信号干扰,连线缠绕;
4)转向传感准确:不仅可以判断左转、右转、直行、还可以判断刹车动作;
本装置适用于任何地区任何骑自行车的人,更可以有效提高学生自行车安全行驶的防护作用;繁忙的学习任务中,我与老师讨论了多种设计方案,最后决定采用掌控板、AI摄像头、人工智能、物联网等技术实现本设计;希望能对广大学生有所帮助,对学生交通安全有所改进。
2、主要工程结构设计与模型制作
2.1结构设计效果图
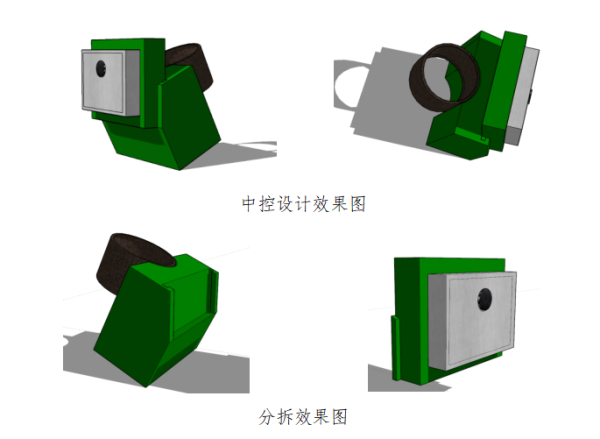

以上结构均采用3D打印,制作方便,易于安装。为增加强度,填充率设置为80%,采用部分支撑、无附着;使用绿色线材打印,色彩醒目。
2.2初稿激光切割图
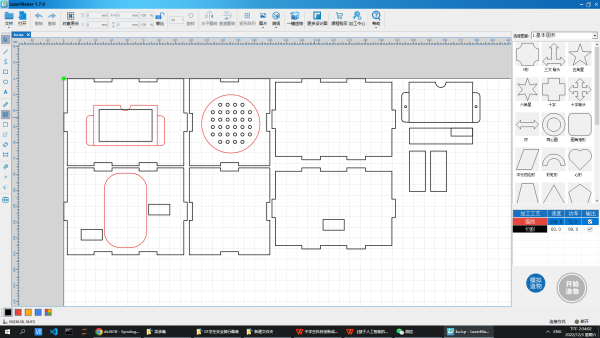
材料:3mm 椴木板,热熔胶
3、硬件选用与连接
3.1 硬件清单
| 序号 | 名称 | 型号 | 数量 | 价格(元) |
| 1 | 掌控板 | 2.0 | 2 | 198 |
| 2 | 掌控宝 | I/O | 2 | 198 |
| 3 | AI摄像头 | 哈仕奇 | 1 | 379 |
| 4 | 磁感应传感器 | DFR0033 | 4 | 60 |
| 5 | 语音合成模块 | 绿深SYN6288 | 1 | 44 |
| 6 | 喇叭 | 0.5W | 1 | 1 |
| 7 | 柔性8*8LED屏 | 1 | 45 | |
| 8 | 杜邦线 | 若干 | ||
| 合计 | 925 |
以上材料均为成品原件,仅为试验使用。
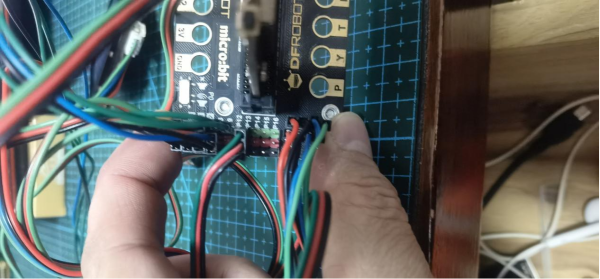
3.2 硬件连接图
3.3 有关技术参数
3.3.1掌控板技术规格:
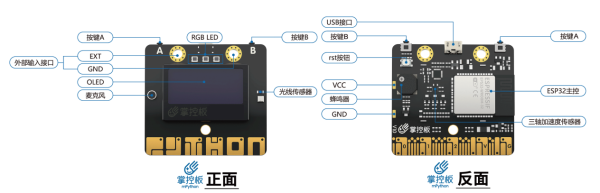
ESP-32主控
处理器:Tensilica LX6双核处理器(一核处理高速连接;一核独立应用开发)
主频:高达240MHz的时钟频率
SRAM:520KB
Flash:8MB
Wi-Fi标准:FCC/CE/TELEC/KCC
Wi-Fi协议:802.11 b/g/n/d/e/i/k/r (802.11n,速度高达150 Mbps),A-MPDU和A-MSDU聚合,支持0.4us防护间隔
频率范围:2.4~2.5 GHz
蓝牙协议:符合蓝牙v4.2 BR/EDR和BLE标准
蓝牙音频:CVSD和SBC音频低功耗:10uA
板载元件
三轴加速度计MSA300,测量范围:±2G
地磁传感器
光线传感器
麦克风
3 颗全彩ws2812灯
1.3英寸OLED显示屏,支持16*16字符显示,分辨率128×64
无源蜂鸣器
支持2个物理按键(A/B)、6个触摸按键
支持1路鳄鱼夹接口,可方便接入各种阻性传感器
拓展接口
20通道数字I/O, (其中支持12路PWM,6路触摸输入)
5通道12bit模拟输入ADC,P0~P4
1路的外部输入鳄鱼夹接口:EXT/GND
支持I2C、UART、SPI通讯协议
供电电压:5V
工作电压:3.3V
最大工作电流:200mA
产品尺寸:48*52mm
包装尺寸:100*103*30mm
单主控板重量:14.8g
含包装重量:66.7g
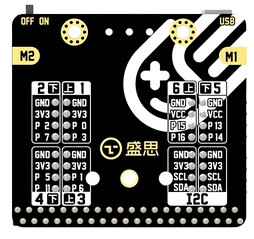
3.3.2 掌控宝I/O引脚说明
3.3.3 led柔性全彩像素屏 ws2812b
产品型号:WS2812-像素屏
光源:SMD 5050 RGB
板材:软铜板
芯片:台湾晶元芯片;
IC型号:WS2811
灰度等级:256级
发光角度:180°
发光颜色:可以通过控制器调为,白,红,黄,蓝,绿,等
标准工作电压: DC 5V
功率: 19.2W(8*8像素屏)76.8W(8*32 16*16像素屏)
防水等级:不防水
FPCB颜色:黑色
FPCB尺寸:8cm*8cm,16cm*16cm,8cm*32cm;厚度3mm;
3.3.4 绿深SYN6288语音合成模块主要参数
产品尺寸:2.3cm * 1.9cm
喇叭尺寸:4cm、8Ω/0.5W
产品引脚:VCC、RXD、TXD、GND、BUSY、BP0、BP1、2.54mm-2P端子。
VCC:5V供电;
RXD:接TTL板或单片机的TXD即数据发送端;
TXD:接TTL板或单片机的RXD即数据接收端;
GND:电源地;
只接以上四个引脚即可工作!
BUSY:忙标志,输出语音时为高电平,空闲时为低电平;
BP0、BP1:喇叭输出端,不分正负极。同背面2P端子并联。
3.3.5 AI视觉传感器
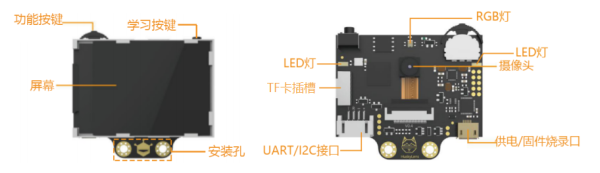
处理器:Kendryte K210
图像传感器:
SEN0305 HuskyLens: OV2640(200W像素)
SEN0336 HuskyLens PRO: OV5640(500W像素)
供电电压:3.3~5.0V
电流消耗:320mA@3.3V, 230mA@5.0V(电流值为典型值;人脸识别模式;80%背光亮度;补光灯关闭)
连线接口:UART,I2C
显示屏:2.0寸IPS,分辨率320*240
内置功能:人脸识别,物体追踪,物体识别,巡线追踪,颜色识别,标签识别,物体分类
尺寸:52mm*44.5mm
4、电脑编程
图形化编程
编程代码:
/*!
* MindPlus
* mpython
*
*/
#include <MPython.h>
#include <DFRobot_HuskyLens.h>
#include <DFRobot_ESP32_Radio.h>
#include <DFRobot_SYN6288.h>
#include <SoftwareSerial.h>
// 函数声明
void DF_ZhuanXiang();
void DF_CheLiangShiBie();
// 创建对象
DFRobot_ESP32Radio Radio;
DFRobot_SYN6288 syn6288;
SoftwareSerial softSerialSyn6288(P9, P8);
DFRobot_HuskyLens huskylens;
// 主程序开始
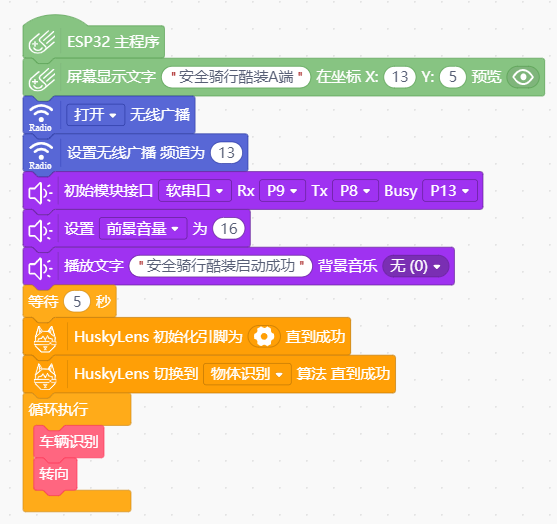
void setup() {
mPython.begin();
display.setCursor(13, 5);
display.print(“安全骑行酷装A端”);
Radio.turnOn();
Radio.setGroup(13);
syn6288.begin(&softSerialSyn6288, P13);
syn6288.setVolume(true, 16);
syn6288.playText(“安全骑行酷装启动成功”, 0);
delay(5000);
huskylens.beginI2CUntilSuccess();
huskylens.writeAlgorithm(ALGORITHM_OBJECT_RECOGNITION);
}
void loop() {
DF_CheLiangShiBie();
DF_ZhuanXiang();
}
// 自定义函数
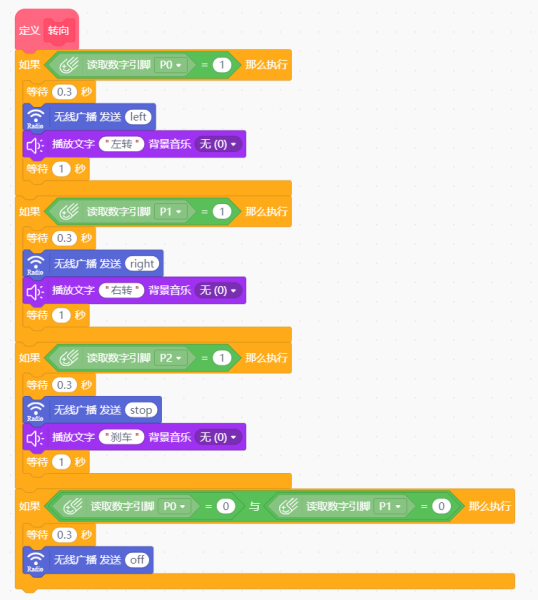
void DF_ZhuanXiang() {
if (((digitalRead(P0))==1)) {
delay(300);
Radio.send(“left”);
syn6288.playText(“左转”, 0);
delay(1000);
}
if (((digitalRead(P1))==1)) {
delay(300);
Radio.send(“right”);
syn6288.playText(“右转”, 0);
delay(1000);
}
if (((digitalRead(P2))==1)) {
delay(300);
Radio.send(“stop”);
syn6288.playText(“刹车”, 0);
delay(1000);
}
if ((((digitalRead(P0))==0) && ((digitalRead(P1))==0))) {
delay(300);
Radio.send(“off”);
}
}
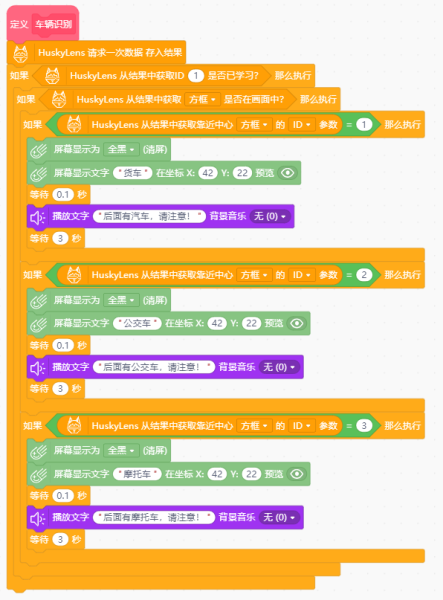
void DF_CheLiangShiBie() {
huskylens.request();
if (huskylens.isLearned(1)) {
if (huskylens.isAppearDirect(HUSKYLENSResultBlock)) {
if ((huskylens.readBlockCenterParameterDirect().ID==1)) {
display.fillScreen(0);
display.setCursor(42, 22);
display.print(“货车”);
delay(100);
syn6288.playText(“后面有汽车,请注意!”, 0);
delay(3000);
}
if ((huskylens.readBlockCenterParameterDirect().ID==2)) {
display.fillScreen(0);
display.setCursor(42, 22);
display.print(“公交车”);
delay(100);
syn6288.playText(“后面有公交车,请注意!”, 0);
delay(3000);
}
if ((huskylens.readBlockCenterParameterDirect().ID==3)) {
display.fillScreen(0);
display.setCursor(42, 22);
display.print(“摩托车”);
delay(100);
syn6288.playText(“后面有摩托车,请注意!”, 0);
delay(3000);
}
}
}
}
5、制作过程


6、创新设计说明
1)人工智能识别车辆,大大提高交通安全,避免骑行学生埋头骑行或回头观察。
2)转向传感器的使用随时检测自行车的行驶方向,背包柔性LED屏随时显示骑行学生的转向,方便汽车司机很快做出决策,从容应对;
2)语音提示,不断提醒自行车后面的状况,降低检测人员的疏忽走神;
3)LED屏与中控无线连接,自动对码,减少学生使用的麻烦;
4)测速器随时监测学生自行车的速度,减少学生飙车的情况;
7、作品设计体会
创造是个严谨中充满奇妙的事,需要想象力与耐心去仔细雕琢。
本作品虽然还是可行性的验证方案,从调研到方案确认,结论一直都很清晰明确;我校创客室工具齐全,因此支架模型设计制作没有什么障碍;经验不足的地方很多,硬件的构架,模型的搭建,电路的传接,以及电脑编程等等,都在制作过程中遇到一些小问题。
AI摄像头准确率不错。但不可避免有报错,比如对贷车与小矫车分不清;由于资金的原因,语音合成模块发出的人声太呆板,不好听;毕竟我们采用积木式的开源硬件,体积偏大,没有很好的隐藏和减小体积;本设计使用积木式开源硬件,费用成本过高,若要进行实际生产,可以考虑使用体积小、价格便宜的主控、AI摄像头。
总之缺点、遗憾不少;但是经过这个项目的设计,我们学习到很多课堂中学不到的知识,让我们感到科技创新不是一蹴而就的,没有坚强的决心,没有坚定的恒心,没有敢于牺牲的精神就无法攀登科技的高峰。使我们坚定了致力于科学研究和发明,在物理、生物、化学等领域勇于探索,并敢于为科技献身的信念。
参考文献:
1、《自行车诱发交通事故原因浅析》 作者:刘彩霞 百度文库
2、《自行车诱发交通事故原因浅析》 作者:陆明恩,赵秀清 百度文库https://xueshu.baidu.com/usercenter/paper/show?paperid=6d8da0c504a008728625ce7fd66cdfbd&site=xueshu_se
3、《一种电动自行车智能识别系统》 公开号:CN211718985U
发明人:刘文杰,陈金明,付道鹏,黄瑞东
4、《基于单片机的儿童自行车智能安全提醒系统研究》 作者:武艳
来源:《江苏科技信息》 2017年第35期 https://wenku.baidu.com/view/ad5a6712954bcf84b9d528ea81c758f5f61f2973.html?fr=income10-doc-search&_wkts_=1670055811589&wkQuery=AI%E6%99%BA%E8%83%BD++%E8%87%AA%E8%A1%8C%E8%BD%A6