摘要:本作品基于人工智能,主要用于提高外卖员工作时的安全水平。本作品运用AI智能识图摄像头对后方车辆进行识别并判定危险程度后对驾驶员进行反馈;并运用柔性太阳能板为摄像头供电。
关键词:AI 物体识别 太阳能
1.项目作品概述
1.1作品背景

随着时代的发展,外卖员这一职业日益增多。大街上随处可见身着蓝色或白色的外卖服的外卖员。但相比于街上大部分的电动车骑行者,外卖员无疑顶着来自经济生活的压力。外卖途中可能会遇到许多突发情况,例如需要长时间等待的电梯,或者温度过低的食物会引起用户的差评,加之平台算法问题,也许两份订单之间的距离过大……超时罚钱,差评罚钱,这些使得外卖员可能不顾风险触犯一些交通规则。
截至2020年12月28日,上海公安部门共查处快递、外卖骑手各类交通违法行为4.3万余起;涉及快递外卖行业的道路交通事故423起,造成7人死亡,347人受伤。深圳自加大查处力度以来,全市2020年共查处电动车交通违法37.3万宗,其中送餐外卖电动车违法7.1万宗,同比上升1042.11%。据公开数据统计,2022年全年因外卖事故死亡的外卖员多达两万七千余人,占比高达骑手的4%。外卖骑手对交通社会安全造成的影响,已经成为不容小觑的社会问题。
基于以上的数据统计,我们分析发生事故的主要原因,除了快递骑手行驶速度快、遵守交通规则意识淡薄外,有很大的一个因素是骑手看不见身后的车辆,骑行时缺少预判,没有判断清楚身后的交通状况,随意转向而被撞翻;设计的AI安全头盔就是为了提高外卖小哥在骑行时对身后车辆的判断。
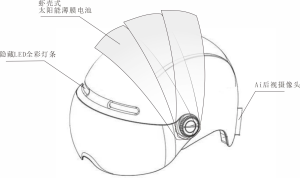
1.2作品主体结构
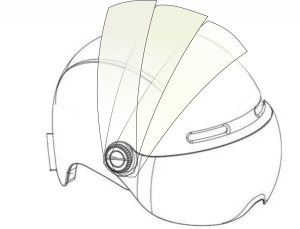
本作于以安全头盔作为主体结构进行改造,设备主体安装在头盔后部;柔性太阳能板安装头盔顶部,设计成虾节结构,可伸缩;安全提示灯安装在头盔帽檐下方,透明面罩(或眼罩)顶部,对视线不造成影响。
1.3实现功能与工程结构设计要求
1.3.1实现功能要求
- 识别后方车辆类型并判定危险程度;
- 用不同颜色灯光反馈危险程度;
- 太阳能供电,减少充电的麻烦;
1.3.2工程结构要求
- 结构合理,不影响驾驶员头盔佩戴体感与视线;
- 结构牢固,不易脱落、损坏;
2、主要工程结构设计与模型制作
3.硬件选用与连接
3.1硬件清单
| 序号 | 名称 | 型号 | 数量 | 单价(元) | 价格(元) |
| 1 | HUSKYLENS二哈识图 | V0.5.1 | 1 | 404 | 404 |
| 2 | 掌控板+扩展板 | 2.0 | 1 | 124 | 124 |
| 3 | 聚合锂电池 | 3.7V | 1 | 39 | 39 |
| 4 | 太阳能电池管理模块 | 5V 1A | 1 | 49 | 49 |
| 5 | 柔性薄太阳能板 | 1.5V | 3 | 39 | 117 |
| 6 | Gravity-4P连接线 | 1 | |||
| 7 | 杜邦线 | 若干 | |||
| 8 | RBG灯带 | 七彩灯带 | 1 | 10 | 10 |
| 9 | 合计 | 743 |
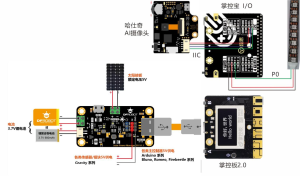
3.2硬件连接图
3.3有关技术参数
3.3.1 HUSKYLENS二哈识图AI摄像头
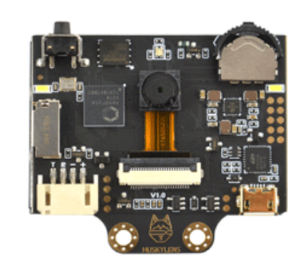

处理器:Kendryte K210
图像传感器:OV2640(200W像素)
供电电压:3.3~5.0V
电流消耗:320mA@3.3V, 230mA@5.0V(人脸识别模式;80%背光亮度;补光灯关闭)
连线接口:UART,I2C
显示屏:2.0寸IPS,分辨率320*240
内置功能:人脸识别,物体追踪,物体识别,巡线追踪,颜色识别,标签识别
尺寸:52*44.5mm
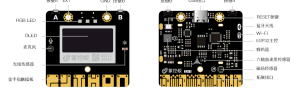
3.3.2掌控板
供电方式: USB供电
工作电压:3.3V
工作电流:100mA
ESP-32主控:
处理器:Tensilica LX6双核处理器(一核处理高速连接;一核立应用开发)
主频:高达240MHz的时钟频率
SRAM:520KB
Flash:4MB
Wi-Fi标准:FCC/CE/TELEC/KCC
Wi-Fi协议:802.11 b/g/n/d/e/i/k/r (802.11n,速度高达150 Mbps),A-MPDU和A-MSDU聚合,支持0.4us防护间隔
频率范围:2.4~2.5 GHz
蓝牙协议:符合蓝牙v4.2 BR/EDR和BLE标准
蓝牙音频:CVSD和SBC音频低功耗:10uA
频率范围:2.4~2.5GHz
掌控板载资源:
六轴传感器:QMI8658C (LGA-14)
陀螺仪:量程可选,最高可测±2048°/s
三轴加速度计:量程可选,最高可测±16 g
光线传感器:光敏三极管ALS-PT19-315C
麦克风:(H)EM4013BTC1R16B-T0-423
磁场传感器:MMC5603NJ(WLP-4),3轴,量程±30 G,精度0.0625mG/LSB
蜂鸣器:SMD-050020F-03040N
RGB灯:3颗WS2812-2020 RGB-LED灯
OLED屏:30PIN排线接口,支持中英文字符显示,大小1.3英寸,分辨率128×64
支持2个物理按键(A/B)
支持6个触摸按键
支持1路外部输入接口,可方便接入各种阻性传感器
拓展接口:
20通道数字I/O,D0~D20 (部分与板上资源复用,支持2路DAC,支持1路PWM,6路触摸输入)
5通道12bit模拟输入ADC,A0~A4
1路的外部输入鳄鱼夹接口:EXT(A2)/GND
I2C接口
UART接口
SPI接口
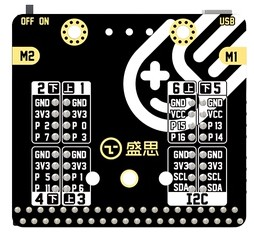
3.3.3 掌控宝I/O引脚说明
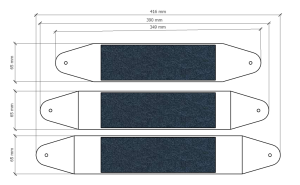
3.3.4柔性薄太阳能板

工作电压:1.5V
工作电流:250mA
开路电压:2.0V
短路电流:420mA
功 率:0.5W
使用环境:–40℃~80℃
性 能:防腐、防潮
尺 寸:长165mm(加黑边195mm) X 宽38mm(加黑边58mm) X 厚0.5mm。
重 量:18克± 2克。
封装材料:耐用、高透光率ETFE薄膜
胶 粘 剂:耐候、高透光率快速固化EVA薄膜
电池类型:三结柔性非晶硅薄膜太阳电池
3.3.5太阳能电池管理模块
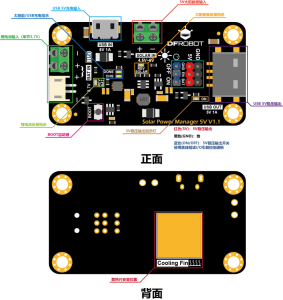
太阳能充电管理芯片:CN3165
太阳能板输入电压:4.5V~6V
电池类型:3.7V单节锂聚合物/锂离子电池(充满电压4.2V)
充电电流(USB/太阳能):900mA Max 涓流、恒流、恒压三段充电
充电截止电压(USB/太阳能):4.2V±1%
稳压输出(USB/5V排针):5V 1A
稳压输出效率(3.7V电池输入):86%@50%负载
USB/太阳能充电效率:73%@3.7V 900mA BAT IN
静态电流:<1 mA
电池(BAT IN):过冲/过放/过流/反接保护
稳压输出(OUT):输出短路/过流/过热保护
太阳能板(SOLAR IN):反接/防倒灌保护
工作温度:-40℃~85℃
尺寸:33.0mm*63.0mm
4.电脑编程
4.1图形化编程
设计启动完成灯光提示,确认AI摄像头启动完成;
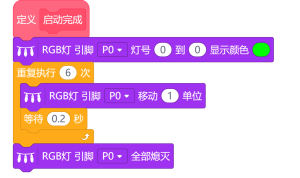
设计三种危险程度,灯光提醒;



主程序

4.2编程代码
/*!
* MindPlus
* mpython
*
*/
#include <DFRobot_NeoPixel.h>
#include <DFRobot_HuskyLens.h>
// 动态变量
volatile float mind_n_ID;
// 函数声明
void DF_QiDongWanCheng();
void DF_YiBanAnQuan();
void DF_YiBanWeiXian();
void DF_ZhongDaWeiXian();
// 创建对象
DFRobot_NeoPixel neoPixel_P0;
DFRobot_HuskyLens huskylens;
// 主程序开始
void setup() {
neoPixel_P0.begin(P0, 7);
neoPixel_P0.setRangeColor(0, 6, 0x000000);
huskylens.beginI2CUntilSuccess();
huskylens.writeAlgorithm(ALGORITHM_OBJECT_RECOGNITION);
DF_QiDongWanCheng();
}
void loop() {
mind_n_ID = huskylens.readBlockCenterParameterDirect().ID;
huskylens.request();
if (huskylens.isLearned(mind_n_ID)) {
if (huskylens.isAppear(mind_n_ID,HUSKYLENSResultBlock)) {
if (((mind_n_ID==1) || (mind_n_ID==2))) {
DF_ZhongDaWeiXian();
}
else if ((mind_n_ID==3)) {
DF_YiBanWeiXian();
}
else if ((mind_n_ID==4)) {
DF_YiBanAnQuan();
}
}
else {
neoPixel_P0.clear();
}
}
}
// 自定义函数
void DF_QiDongWanCheng() {
neoPixel_P0.setRangeColor(0, 0, 0x00FF00);
for (int index = 0; index < 6; index++) {
neoPixel_P0.shift(1);
delay(200);
yield();
}
neoPixel_P0.clear();
}
void DF_YiBanAnQuan() {
for (int index = 0; index < 10; index++) {
neoPixel_P0.clear();
delay(500);
neoPixel_P0.setRangeColor(0, 6, 0x00FF00);
delay(500);
yield();
}
}
void DF_YiBanWeiXian() {
for (int index = 0; index < 10; index++) {
neoPixel_P0.clear();
delay(500);
neoPixel_P0.setRangeColor(0, 6, 0x0000FF);
delay(500);
yield();
}
}
void DF_ZhongDaWeiXian() {
for (int index = 0; index < 10; index++) {
neoPixel_P0.clear();
delay(500);
neoPixel_P0.setRangeColor(0, 6, 0xFF0000);
delay(500);
yield();
}
}
5. 制作过程
初步构思:想设计成摩托骑手的款式;头部全部防护,语音提醒,蓝牙、WiFi加持;全部透明面罩;
1)外形结构讨论:通过观察分析,我们南方的快递骑手普遍头戴半盔式,喜欢通风,透气

2)设计定位:快递小哥AI后视安全头盔,通风透气,简单方便,太阳能充电;
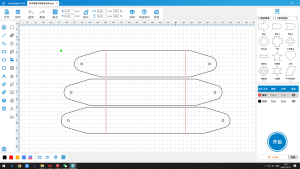
3)模型制作,激光切割、拼装



4)硬件连接设计

5)编程设计

6)调试

6、创新设计说明
- 人工智能:运用AI智能摄像头,后视识别后方车辆类型,并判断危险程度。灯光提醒,反馈速度快;
- 头盔顶部柔性太阳能板设计成虾壳结构,可伸缩折叠;减少充电的麻烦,绿色环保,外形科技感十足;
7.作品设计体会
本作品从查找资料,材料购买,作品设计一直目的清晰,富有条理。加之所需程序简单易懂,在作品创作前期一路畅通无阻,却在作品外形设计与加工处遇到了极大的困难。
由于本作品主要是对安全头盔进行改造,在外形设计(硬件固定)方面需要考虑许多因素:不能使整体外形太过厚重或者在头盔内测进行过多装饰,导致影响驾驶员的佩戴体验,但此产品的所需硬件确实过大,且头外侧为弧形,大大增加了关于硬件固定设计的难度。但我们进行思考与讨论后,同样拿出了几项合理可行的方案,例如将后大的Nano板更换为相对扁平的掌控板;通过更换长短不同的杜邦线来调整硬件固定的位置,使作品整体上更为美观……
除却外形,作品功能上也有许多缺陷,例如摄像头不能同时识别两种情况,只能以镜头中心区域为主以及雨天无法使用… 此作品想正式投入使用还有很长一段距离。但我们在作品创作的过程中不仅学到了许多新的有关知识,还锻炼了自己的动手能力与合作技能,虽然作品缺陷诸多,但作品成型的那一刻我们都感到无比自豪。后续有时间我们也会参考市面上的同类商品,在头盔上添加蓝牙等其他功能。
每一次尽心尽力的创作,都会使我们学到珍贵的知识和技能,获得无比宝贵的经验与体验,让我们受益终生。
参考文献:
- 《基于树莓派的骑行智能头盔设计》百度文库https://wenku.baidu.com/view/88e62b7cce7931b765ce0508763231126fdb775d.html?fr=income2-doc-search&_wkts_=1696905116461&wkQuery=AI%E5%AE%89%E5%85%A8%E5%A4%B4%E7%9B%94
2、《浅析YOLO目标检测算法AI安全帽识别技术及场景应用》 稀土掘金/ 技术开发
https://juejin.cn/post/7085649013768355871
3、《智能头盔设计,给您的安全护航新体验!》 电子发烧友
https://www.elecfans.com/d/2221450.html

